User Manual of HOBBYWING 20221019 Tunalyzer
![]() Thank you for purchasing this HOBBYWING product! Please read the following statement carefully before use and, once used, it is considered to be an acceptance of all the contents. Please strictly observe and adhere to the manual installation with this product. Unauthorized modification may result in personal injury and product damage. We reserve the rights to update the design and performance of the Product without notice. Different languages are available. Chinese language will be available to the mainland of China while English language will be available to the rest of the world.
Thank you for purchasing this HOBBYWING product! Please read the following statement carefully before use and, once used, it is considered to be an acceptance of all the contents. Please strictly observe and adhere to the manual installation with this product. Unauthorized modification may result in personal injury and product damage. We reserve the rights to update the design and performance of the Product without notice. Different languages are available. Chinese language will be available to the mainland of China while English language will be available to the rest of the world.
Introduction
This tool is used to test the brushless DC motor and its internal components. It can measure the Kv value, rpm, current, end-bell timing and sensor elements of the brushless motor. These parameters can be displayed on the LCD in real time, so that you can have an intuitive and full understanding of the motor used. In addition, the built-in Bluetooth of the Tunalyzer can establish communication with the esc through the mobile phone app to realize the parameter setting and firmware updating of the esc.
Specifications

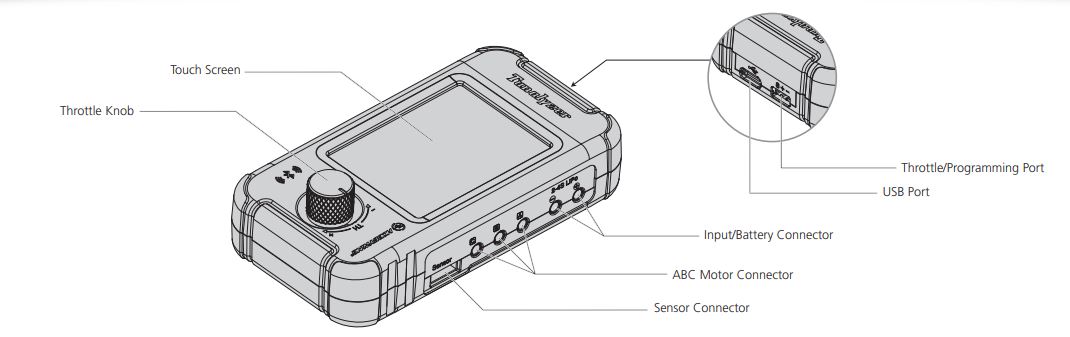
Diagram
User Guide
Connection
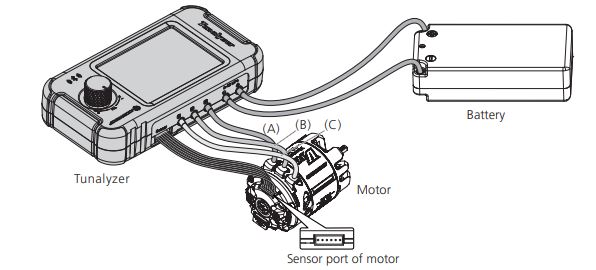
1) Sensored Brushless Motor
2) Sensorless Brushless Motor
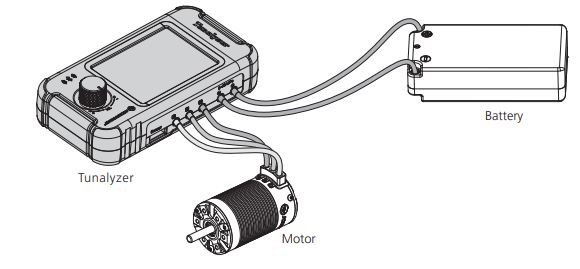
![]()
- Do not connect the battery to the A B C motor interface by mistake, otherwise the device will be damaged.
- When testing the sensored brushless motor, the A, B and C wiring must be connected in strict accordance with the sequence of A-A, B-B and C-C.
- During the test, ensure that the motor A, B and C ends will not touch each other and cause short circuit, so as to avoid damaging the device.
Quick Start
- Connect the phase cables A B C and sensor cable to the motor.
- Connect the battery(2-4S Lipo).
- Click ”Auto Motor Test”.
After automatic motor test, all test data will be displayed. Sliding the screen upward will display the data item on the next page, and sliding the screen downward will display the data item on the previous page; Click the return icon in the upper left corner to return to the home page.
Note: When you power on for the first time and click “Auto Motor Test”, the motor pole setting will automatically pop up,when you click again, it will not. Please be sure to set the correct motor pole.
Menu Function
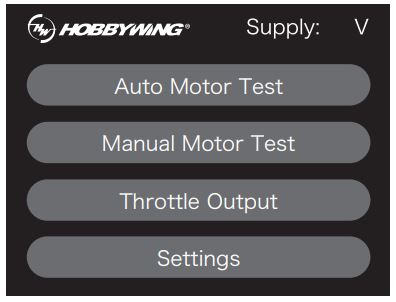
- Auto Motor Test
This item is an automatic test function. After clicking this option, the Tunalyzer will automatically drive the motor to rotate, after a few seconds, the test is completed and the measured data will be displayed. - Manual Motor Test
This item is a manual test function. After clicking this option, you need to manually control the motor rotation through the throttle knob on the right of Tunalyzer. During the manual operation, the motor data will be displayed on the screen in real time. - Throttle Output
This function uses the Tunalyzer as a throttle signal generator, it can be used to control esc, servo and other equipment requiring PWM signal input. and the output port is the port marked with “-+S” on the left side of the Tunalyzer. When the throttle cable of esc is connected to the “- + s” port of the Tunalyzer, the esc/motor can be controlled through the throttle knob on the Tunalyzer, which acts as the throttle trigger of the transmitter, the wiring diagram is as follows. The throttle signal pulse width range is 1050us to 1195us, the maximum throttle pulse width is 1195us in the forward direction (the “+” direction on the knob), 1050us in the reverse direction (the “-” direction on the knob), and 1500us in the neutral of the throttle.
The voltage range supported by the throttle output port is 6-8.4V. Usually, the built-in BEC of the esc can supply power. If the esc has no built-in BEC, it needs to supply additional power through the “Y” cable.
Note:
1. When used as the throttle output function, the input / battery port of the Tunalyzer cannot be connected to a battery.
2. When connecting the esc to the throttle output port for the first time, please calibrate the throttle range to ensure safe running.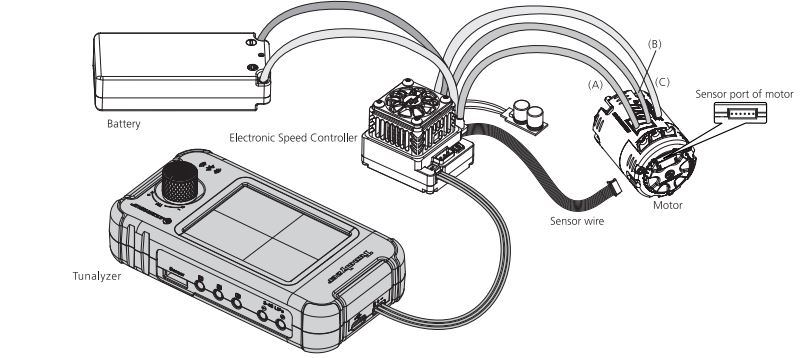
- Settings
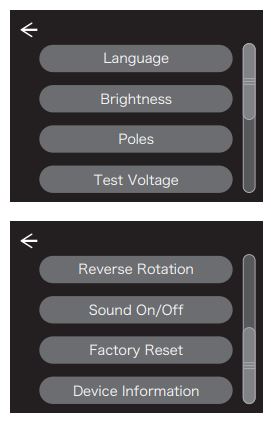
Language: Chinese and English are available.
Brightness: Used to adjust the brightness of the display screen.
Poles: Used to set the number of motor poles. 2-60 poles are adjustable. This setting is very important for testing the motor, it must be set according to the actual motor pole specification, otherwise the measured rpm, Kv, etc. will be inaccurate.
Test Voltage: This voltage is a stable test voltage obtained after processing on the basis of the input voltage, it can be selected in 7.4V and 3.4V, the default setting is 7.4V.
This function is to ensure the consistency of test voltage and avoid different conditions due to changes in battery voltage. If the input voltage is lower than a certain value, the corresponding test voltage will also drop.
Note: If the motor’s KV>8000(or <4.5T), please set 3.4V test voltage, otherwise please set 7.4V test voltage. Improper test voltage may lead to abnormal test (trigger protection function) or inaccurate data.
Reverse Rotation: Used to enable or disable the motor reverse rotation function in the manual motor test mode.
Sound On/Off: Used to turn the operating sound on or off.
Factory Reset: Used to restore factory settings.
Device Information: You can view the hardware version/software version/Bluetooth version of the device.
Test Item Explanation
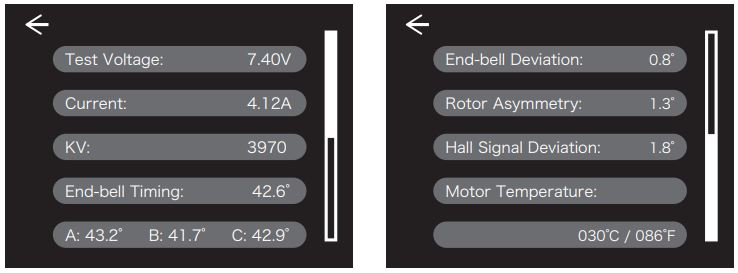
Test Voltage: Refers to the set test voltage. See the menu function introduction above for details.
Current: The running current under the measured conditions.
KV: The ratio of motor rpm to voltage at the corresponding throttle output.
End-bell Timing: Refers to the end-bell timing of the motor, and the data displayed at A B C position is the actual timing corresponding to each phase. Smaller difference between these values makes a good sensor. This is not only related to the sensor elements, but also related to the alignment of the sensor installed on the PCB inside the motor and the distance to the rotor.
End-bell Deviation: Refers to the difference of the measured three-phase timing of A, B and C, indicates the deviation and alignment of the sensor elements. Smaller this value means better sensor status.
Rotor Asymmetry: In an ideal state, the N pole and S pole of the magnet account for half and the area is exactly the same, but this is not the case due to manufacturing tolerance. The rotor asymmetry here represents the deviation from an ideal magnet. Smaller this value means better rotor/magnet.
Hall Signal Deviation: Refers to the deviation of A B C three phase Hall signal. Smaller this value means better signal consistency.
Motor Temperature: The current temperature of motor.
Note: Since the timing and the following test items are related to hall sensor, these data do not exist when testing the sensorless brushless motor.
Bluetooth Function
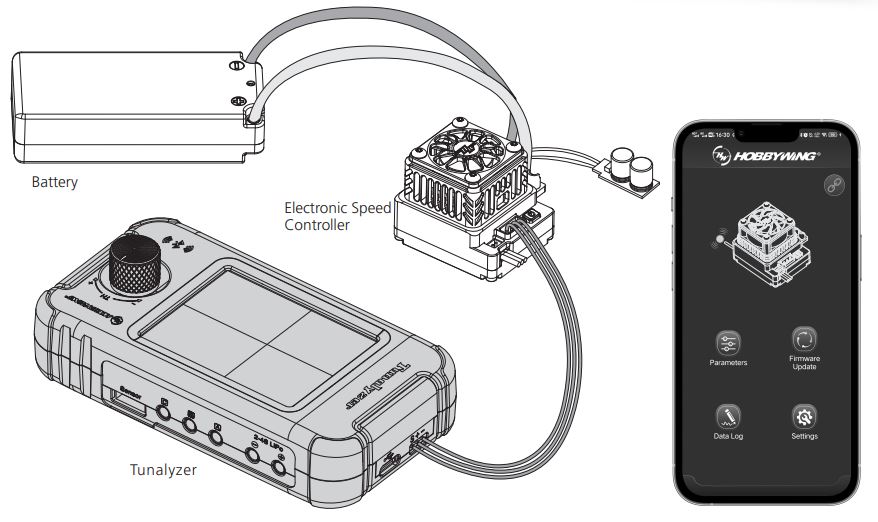
The built-in Bluetooth module of the Tunalyzer supports setting and updating the esc through the mobile phone app. This function will be available for the esc that supports the use of OTA Bluetooth module.
The specific operation methods are as follows:
- Download the HW link app from the Hobbywing official website or the app store and install it on your mobile phone.
- Wiring and operation
Connect the programming port of the esc to the “- + s” port on the left side of the Tunalyzer, then connect the esc with the battery, and turn on the esc.
Then open the HW link app, click the “connection” sign in the upper right corner of the app home page, a nearby Bluetooth device will pop up, select the Bluetooth name “HW-BLE*****”, enter the factory default password “888888”, click OK to establish a Bluetooth connection with the Tunalyzer, and then you can set or update the esc.Note: As for the programming port of the esc (the above wiring diagram is based on XERUN XR10 Pro G2S as an example), the port may be different due to the use of different escs, for example, the independent programming port, fan port and throttle cable are used. For details, please refer to the esc manual to find the correct programming port, otherwise, this function cannot be used normally